
Pesquisadores da Ajou University, na Coreia do Sul, construíram uma mão robótica que é capaz de manipular objetos frágeis assim como aplicar força suficiente e de forma constante para outros tipos de atividades.
O robô foi projetado para imitar a aparência de uma mão humana e apresenta habilidades para manusear diferentes objetos graças aos sensores localizados nas pontas dos dedos. Assim, a mão robótica é capaz de segurar um ovo sem quebrá-lo, utilizar pinças para pegar um chip de computador e ainda amassar uma lata de metal.
Ela pesa 1,1 quilograma, tem 22 centímetros de comprimento e é feita de alumínio e aço. Na palma da mão robótica, estão localizados três pequenos motores responsáveis por movimentar as partes metálicas que exercem a função dos tendões ao redor de 20 articulações.
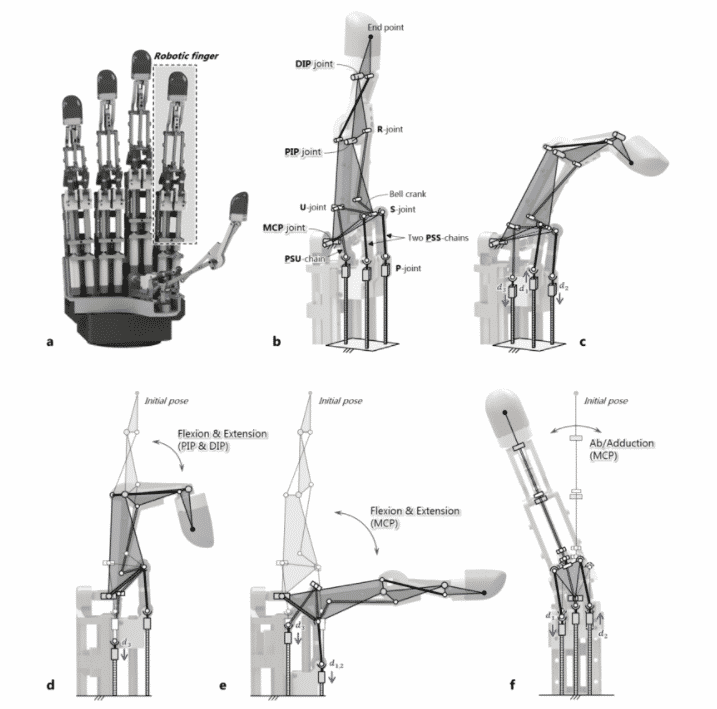
Imagem retirada diretamente do estudo publicado na Nature Communications
Toda essa estrutura permite que os dedos robóticos se movam para os lados, para frente e para trás, além de se dobrarem, simulando quase todos os movimentos realizados por uma mão humana, segundo o estudo publicado na Nature Communications.
A expectativa é que a mão robótica possa atender demandas médicas, sendo utilizada como prótese, ou ainda ser incorporada a robôs que utilizam inteligência artificial para manipular objetos.
Precisão e resistência
Após verificarem a capacidade da mão robótica de realizar tarefas com destreza, como servir uma bebida em um copo, os pesquisadores decidiram testar se ela também seria capaz de manusear ferramentas.
O resultado do experimento revelou que o robô poderia ser programado para segurar uma tesoura e utilizá-la para cortar papel e para pegar um microchip com uma pinça e colocá-lo em uma placa de circuito.
O próximo passo foi testar a resistência da mão robótica e, para isso, os pesquisadores programaram um dos dedos para pressionar um sensor constantemente por 30 minutos. Eles observaram que a força aplicada pelo dedo quase não diminuiu durante este intervalo de tempo.
O experimento seguinte consistiu em utilizar a mão robótica para levantar halteres de 18 quilogramas. Os pesquisadores conseguiram realizar a ação sem danificar qualquer parte da estrutura.
Por fim, eles programaram um dos dedos robóticos para repetir um movimento de dobrar e flexionar repetidamente para pressionar um sensor a cada segundo durante 11 minutos. Ele foi capaz de completar a tarefa sem reduzir a velocidade ou perder força.
Aplicações futuras
Uma das principais vantagens da mão robótica desenvolvida pelos pesquisadores da Ajou University é que, além de poder manipular objetos tanto de forma cuidadosa como aplicando força, a base dela pode ser acoplada mais facilmente a braços robóticos disponíveis comercialmente em comparação a outras soluções existentes.
No futuro, os cientistas esperam que a mão possa integrar algum robô com inteligência artificial que seja capaz de sentir e manipular objetos. Outra alternativa seria criar uma versão mais leve da mão robótica para que ela seja utilizada como prótese.
Neste último caso, além de reduzir o peso do protótipo, também seria necessário realizar alguns ajustes para tornar a mão robótica mais parecida com uma mão humana. O objetivo dos pesquisadores, portanto, é começar a desenvolver uma pele artificial flexível para incrementar o seu projeto inicial.


